Execute Quantum Dynamics with PyTDSCF – Henon-Heiles Hamiltonian
See also https://qclovers.github.io/PyTDSCF/notebook/henon_heiles_HO-DVR.html
[1]:
try:
import pytdscf
except ModuleNotFoundError:
!uv pip install -U git+https://github.com/QCLovers/PyTDSCF --quiet
try:
import discvar
except ModuleNotFoundError:
!uv pip install -U git+https://github.com/QCLovers/Discvar --quiet
[2]:
import numpy as np
import sympy
from discvar import HarmonicOscillator as HO
from pytdscf import BasInfo, Model, Simulator, units
from pytdscf.dvr_operator_cls import TensorOperator
from pytdscf.hamiltonian_cls import TensorHamiltonian
import pympo
\[\hat{H} = \frac{\omega}{2}\sum_{i=1}^{f} \left( - \frac{\partial^2}{\partial Q_i^2} + Q_i^2 \right) + \lambda \left( \sum_{i=1}^{f-1} Q_i^2 Q_{i+1} - \frac{1}{3} Q_{i+1}^3 \right)\]
in mass-weighted coordinate is
\[\hat{H} = \frac{1}{2}\sum_{i=1}^{f} \left( - \frac{\partial^2}{\partial q_i^2} + \omega^2 q_i^2 \right) + \lambda \omega^{\frac{3}{2}} \left( \sum_{i=1}^{f-1} q_i^2 q_{i+1} - \frac{1}{3} q_{i+1}^3 \right)\]
[3]:
ω = 3000
λ = 1.0e-07
f = 6
N = 10
m = 10
Δt = 0.1
backend = "numpy"
[4]:
dvr_prims = [HO(N, ω) for _ in range(f)]
basinfo = BasInfo([dvr_prims])
[5]:
ω_au = ω / units.au_in_cm1
ω_symbol = sympy.Symbol("omega")
λ_symbol = sympy.Symbol("lambda")
dq2 = [prim.get_2nd_derivative_matrix_dvr() for prim in dvr_prims]
q = [np.array(prim.get_grids()) ** 2 for prim in dvr_prims]
q2 = [np.array(prim.get_grids()) ** 2 for prim in dvr_prims]
q3 = [np.array(prim.get_grids()) ** 2 for prim in dvr_prims]
[6]:
isite = 0
sympy.Symbol(r"\frac{\partial}{\partial q^2" + f"_{isite}" + "}")
[6]:
$\displaystyle \frac{\partial}{\partial q^2_0}$
[7]:
kinetic_sop = pympo.SumOfProducts([])
for isite in range(f):
kinetic_sop -= (
1
/ 2
* pympo.OpSite(
r"\frac{\partial}{\partial q^2" + f"_{isite}" + "}",
isite,
value=dq2[isite],
)
)
kinetic_sop.symbol
[7]:
$\displaystyle - 0.5 \frac{\partial}{\partial q^2_0} - 0.5 \frac{\partial}{\partial q^2_1} - 0.5 \frac{\partial}{\partial q^2_2} - 0.5 \frac{\partial}{\partial q^2_3} - 0.5 \frac{\partial}{\partial q^2_4} - 0.5 \frac{\partial}{\partial q^2_5}$
[8]:
potential_sop = pympo.SumOfProducts([])
for isite in range(f):
potential_sop += (
ω_symbol**2
/ 2
* pympo.OpSite(r"q^2" + f"_{isite}", isite, value=q2[isite])
)
if isite < f - 1:
potential_sop += (
ω_symbol**1.5
* λ_symbol
* pympo.OpSite(r"q^2" + f"_{isite}", isite, value=q2[isite])
* pympo.OpSite(r"q" + f"_{isite+1}", isite + 1, value=q[isite + 1])
)
potential_sop -= (
ω_symbol**1.5
* λ_symbol
/ 3
* pympo.OpSite(r"q^3" + f"_{isite}", isite + 1, value=q3[isite + 1])
)
potential_sop.symbol
[8]:
$\displaystyle \lambda \omega^{1.5} q^{2}_{0} q_{1} + \lambda \omega^{1.5} q^{2}_{1} q_{2} + \lambda \omega^{1.5} q^{2}_{2} q_{3} + \lambda \omega^{1.5} q^{2}_{3} q_{4} + \lambda \omega^{1.5} q^{2}_{4} q_{5} - \frac{\lambda \omega^{1.5} q^{3}_{0}}{3} - \frac{\lambda \omega^{1.5} q^{3}_{1}}{3} - \frac{\lambda \omega^{1.5} q^{3}_{2}}{3} - \frac{\lambda \omega^{1.5} q^{3}_{3}}{3} - \frac{\lambda \omega^{1.5} q^{3}_{4}}{3} + \frac{\omega^{2} q^{2}_{0}}{2} + \frac{\omega^{2} q^{2}_{1}}{2} + \frac{\omega^{2} q^{2}_{2}}{2} + \frac{\omega^{2} q^{2}_{3}}{2} + \frac{\omega^{2} q^{2}_{4}}{2} + \frac{\omega^{2} q^{2}_{5}}{2}$
[9]:
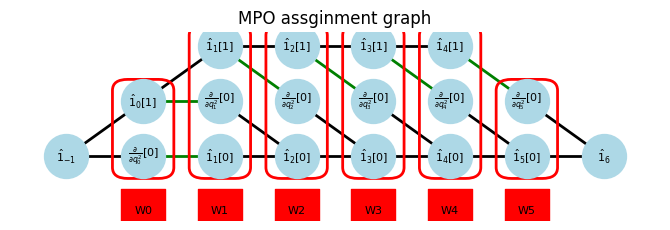
am_kinetic = pympo.AssignManager(kinetic_sop.simplify())
am_kinetic.assign()
am_kinetic.show_graph()
display(*am_kinetic.Wsym)
kinetic_mpo = am_kinetic.numerical_mpo()
2024-12-31 18:07:40.128 | INFO | pympo.bipartite:assign:286 - assigned 1/6
2024-12-31 18:07:40.129 | INFO | pympo.bipartite:assign:286 - assigned 2/6
2024-12-31 18:07:40.130 | INFO | pympo.bipartite:assign:286 - assigned 3/6
2024-12-31 18:07:40.130 | INFO | pympo.bipartite:assign:286 - assigned 4/6
2024-12-31 18:07:40.131 | INFO | pympo.bipartite:assign:286 - assigned 5/6
2024-12-31 18:07:40.131 | INFO | pympo.bipartite:assign:286 - assigned 6/6
$\displaystyle \left[\begin{matrix}\frac{\partial}{\partial q^2_0} & 1\end{matrix}\right]$
$\displaystyle \left[\begin{matrix}-0.5 & 0\\- 0.5 \frac{\partial}{\partial q^2_1} & 1\end{matrix}\right]$
$\displaystyle \left[\begin{matrix}1 & 0\\- 0.5 \frac{\partial}{\partial q^2_2} & 1\end{matrix}\right]$
$\displaystyle \left[\begin{matrix}1 & 0\\- 0.5 \frac{\partial}{\partial q^2_3} & 1\end{matrix}\right]$
$\displaystyle \left[\begin{matrix}1 & 0\\- 0.5 \frac{\partial}{\partial q^2_4} & 1\end{matrix}\right]$
$\displaystyle \left[\begin{matrix}1\\- 0.5 \frac{\partial}{\partial q^2_5}\end{matrix}\right]$
[10]:
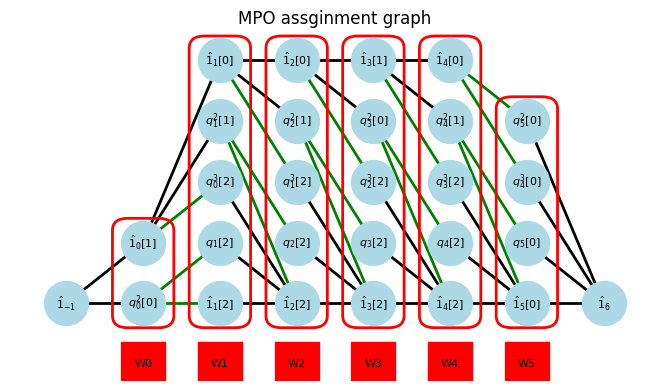
am_potential = pympo.AssignManager(potential_sop.simplify())
am_potential.assign(keep_symbol=True) # keep symbol is too slow but intuitive.
am_potential.show_graph()
display(*am_potential.Wsym)
potential_mpo = am_potential.numerical_mpo(subs={ω_symbol: ω_au, λ_symbol: λ})
2024-12-31 18:07:40.370 | INFO | pympo.bipartite:assign:286 - assigned 1/6
2024-12-31 18:07:40.375 | INFO | pympo.bipartite:assign:286 - assigned 2/6
2024-12-31 18:07:40.480 | INFO | pympo.bipartite:assign:286 - assigned 3/6
2024-12-31 18:07:40.602 | INFO | pympo.bipartite:assign:286 - assigned 4/6
2024-12-31 18:07:40.813 | INFO | pympo.bipartite:assign:286 - assigned 5/6
2024-12-31 18:07:41.105 | INFO | pympo.bipartite:assign:286 - assigned 6/6
$\displaystyle \left[\begin{matrix}q^{2}_{0} & 1\end{matrix}\right]$
$\displaystyle \left[\begin{matrix}0 & 0 & \lambda \omega^{1.5} q_{1} + \frac{\omega^{2}}{2}\\1 & q^{2}_{1} & - \frac{\lambda \omega^{1.5} q^{3}_{0}}{3}\end{matrix}\right]$
$\displaystyle \left[\begin{matrix}1 & q^{2}_{2} & - \frac{\lambda \omega^{1.5} q^{3}_{1}}{3}\\0 & 0 & \lambda \omega^{1.5} q_{2} + \frac{\omega^{2}}{2}\\0 & 0 & 1\end{matrix}\right]$
$\displaystyle \left[\begin{matrix}q^{2}_{3} & 1 & - \frac{\lambda \omega^{1.5} q^{3}_{2}}{3}\\0 & 0 & \lambda \omega^{1.5} q_{3} + \frac{\omega^{2}}{2}\\0 & 0 & 1\end{matrix}\right]$
$\displaystyle \left[\begin{matrix}0 & 0 & \lambda \omega^{1.5} q_{4} + \frac{\omega^{2}}{2}\\1 & q^{2}_{4} & - \frac{\lambda \omega^{1.5} q^{3}_{3}}{3}\\0 & 0 & 1\end{matrix}\right]$
$\displaystyle \left[\begin{matrix}- \frac{\lambda \omega^{1.5} q^{3}_{4}}{3} + \frac{\omega^{2} q^{2}_{5}}{2}\\\lambda \omega^{1.5} q_{5} + \frac{\omega^{2}}{2}\\1\end{matrix}\right]$
[11]:
display(sympy.Mul(*am_potential.Wsym)[0].expand())
display(potential_sop.symbol)
assert sympy.Mul(*am_potential.Wsym)[0].expand() == potential_sop.symbol.expand()
$\displaystyle \lambda \omega^{1.5} q^{2}_{0} q_{1} + \lambda \omega^{1.5} q^{2}_{1} q_{2} + \lambda \omega^{1.5} q^{2}_{2} q_{3} + \lambda \omega^{1.5} q^{2}_{3} q_{4} + \lambda \omega^{1.5} q^{2}_{4} q_{5} - \frac{\lambda \omega^{1.5} q^{3}_{0}}{3} - \frac{\lambda \omega^{1.5} q^{3}_{1}}{3} - \frac{\lambda \omega^{1.5} q^{3}_{2}}{3} - \frac{\lambda \omega^{1.5} q^{3}_{3}}{3} - \frac{\lambda \omega^{1.5} q^{3}_{4}}{3} + \frac{\omega^{2} q^{2}_{0}}{2} + \frac{\omega^{2} q^{2}_{1}}{2} + \frac{\omega^{2} q^{2}_{2}}{2} + \frac{\omega^{2} q^{2}_{3}}{2} + \frac{\omega^{2} q^{2}_{4}}{2} + \frac{\omega^{2} q^{2}_{5}}{2}$
$\displaystyle \lambda \omega^{1.5} q^{2}_{0} q_{1} + \lambda \omega^{1.5} q^{2}_{1} q_{2} + \lambda \omega^{1.5} q^{2}_{2} q_{3} + \lambda \omega^{1.5} q^{2}_{3} q_{4} + \lambda \omega^{1.5} q^{2}_{4} q_{5} - \frac{\lambda \omega^{1.5} q^{3}_{0}}{3} - \frac{\lambda \omega^{1.5} q^{3}_{1}}{3} - \frac{\lambda \omega^{1.5} q^{3}_{2}}{3} - \frac{\lambda \omega^{1.5} q^{3}_{3}}{3} - \frac{\lambda \omega^{1.5} q^{3}_{4}}{3} + \frac{\omega^{2} q^{2}_{0}}{2} + \frac{\omega^{2} q^{2}_{1}}{2} + \frac{\omega^{2} q^{2}_{2}}{2} + \frac{\omega^{2} q^{2}_{3}}{2} + \frac{\omega^{2} q^{2}_{4}}{2} + \frac{\omega^{2} q^{2}_{5}}{2}$
[12]:
K = {
tuple([(idof, idof) for idof in range(f)]): TensorOperator(mpo=kinetic_mpo)
}
kinetic = [[K]]
V = {tuple([idof for idof in range(f)]): TensorOperator(mpo=potential_mpo)}
potential = [[V]]
H = TensorHamiltonian(
ndof=f, potential=potential, kinetic=kinetic, backend=backend
)
operators = {"hamiltonian": H}
[13]:
model = Model(basinfo=basinfo, operators=operators)
model.m_aux_max = m
vib_gs = [1.0] + [0.0] * (N - 1)
vib_es = [0.0] + [1.0] + [0.0] * (N - 2)
print([[vib_es] + [vib_gs] * (f - 1)])
model.init_weight_VIBSTATE = [
[vib_es] + [vib_gs] * (f - 1)
] # only first mode is excited
[[[0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], [1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], [1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], [1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], [1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0], [1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]]
[14]:
jobname = "henon_heiles"
simulator = Simulator(jobname=jobname, model=model, backend=backend)
simulator.propagate(maxstep=100, stepsize=Δt)
2024-12-31 18:07:41,749 - INFO:main.pytdscf._const_cls -
____ __________ .____ ____ _____
/ _ | /__ __/ _ \ / ___ / _ \ / ___/
/ /_) /_ __/ / / / ||/ /__ / / )_// /__
/ ___/ / / / / / / / |.__ / | __/ ___/
/ / / /_/ / / / /_/ /___/ /| \_/ / /
/__/ \__, /_/ /_____/_____/ \____/_/
/____/
2024-12-31 18:07:41,749 - INFO:main.pytdscf._const_cls - Log file is ./henon_heiles_prop/main.log
2024-12-31 18:07:41,749 - INFO:main.pytdscf.simulator_cls - Set integral of DVR basis
2024-12-31 18:07:41,754 - INFO:main.pytdscf.simulator_cls - Set initial wave function (DVR basis)
2024-12-31 18:07:41,754 - INFO:main.pytdscf.simulator_cls - Prepare MPS w.f.
2024-12-31 18:07:41,755 - INFO:main.pytdscf._mps_cls - Initial MPS: 0-state with weights 1.0
2024-12-31 18:07:41,761 - INFO:main.pytdscf.simulator_cls - Wave function is saved in wf_henon_heiles.pkl
2024-12-31 18:07:41,762 - INFO:main.pytdscf.simulator_cls - Start initial step 0.000 [fs]
2024-12-31 18:07:41,914 - INFO:main.pytdscf.simulator_cls - End 0 step; propagated 0.100 [fs]; AVG Krylov iteration: 4.00
2024-12-31 18:07:46,377 - INFO:main.pytdscf.simulator_cls - End 99 step; propagated 9.900 [fs]; AVG Krylov iteration: 4.00
2024-12-31 18:07:46,377 - INFO:main.pytdscf.simulator_cls - End simulation and save wavefunction
2024-12-31 18:07:46,381 - INFO:main.pytdscf.simulator_cls - Wave function is saved in wf_henon_heiles.pkl
[14]:
(0.054677510112094874, <pytdscf.wavefunction.WFunc at 0x1251f9130>)
[15]:
!ls {jobname}*
autocorr.dat expectations.dat main.log populations.dat
/opt/homebrew/Cellar/python@3.12/3.12.2_1/Frameworks/Python.framework/Versions/3.12/lib/python3.12/pty.py:95: RuntimeWarning: os.fork() was called. os.fork() is incompatible with multithreaded code, and JAX is multithreaded, so this will likely lead to a deadlock.
pid, fd = os.forkpty()
[16]:
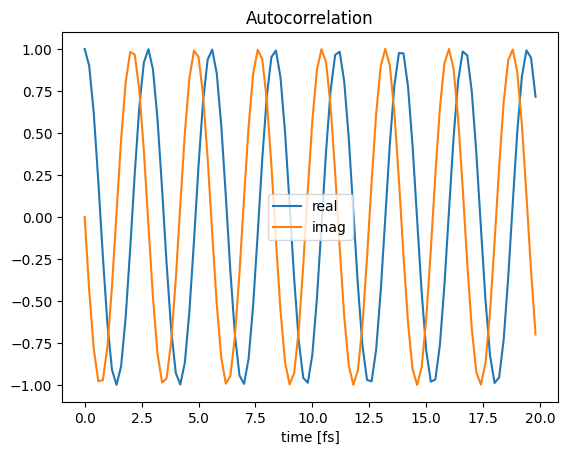
import matplotlib.pyplot as plt
from pytdscf import spectra
time, autocorr = spectra.load_autocorr(jobname + "_prop" + "/autocorr.dat")
plt.plot(time, autocorr.real, label="real")
plt.plot(time, autocorr.imag, label="imag")
plt.title("Autocorrelation")
plt.legend()
plt.xlabel("time [fs]")
plt.show()
[ ]: